
From automotive to agricultural, the applications of the Ethernet system
Remote function control technology derives from the automotive sector, but can find important applications in agricultural machinery. Like in the automotive field, in agriculture too the use of digital cameras can improve the quality of work and the control of procedures, with positive effects also in terms of safety
In a car, as in an agricultural machine, an Ethernet network is not exactly a component that customers will request as an option, nor will it ever be mentioned as such in the dealers’ advertising brochures. It is therefore difficult to justify the enormous effort, from an economic point of view, of the paradigm shift from the other in-vehicle networks (CAN, FlexRay, LIN, etc.), of acquiring technological know-how, of the security aspects, the constraints on hardware and software architectures of the knots that this technology imposed on the automotive manufacturers in the last five years. Were it not for the quantity and innovative nature of the use cases that Ethernet brings with it. Just think of the many advanced driver assistance systems (ADAS) that we can find even in the mid-market segments. One prime example is the “Collision avoidance system”, and another is the infotainment systems, a union of data with drivers, passengers with entertainment, with the simultaneous transmission from multiple sources of multimedia content, all seamlessly.
The thread that ties together these areas is the essential need for greater throughput of data transmitted between the electronic control units (ECUs). CANbus, which has been dominating the in-vehicle networks for decades, with its 8 bytes of data and the relatively low speed (nominally limited to 2 Mbps, but commonly more widely used at 250 and 500 Kbps) does not allow its application in use cases where sensor systems (e.g. LIDAR and RADAR), security constraints on encryption or burdensome data streams (such as video) impose high throughput volumes. That is why Ethernet (with its 1500 bytes of data per message and 100Mbps) is gaining more and more space within the automotive in-vehicle networks and generates a great deal of interest in the agricultural and earth-moving machinery industry, while it is an established reality in industrial sectors like avionics and trams. A fundamental difference between the two network types is topology: while CANbus is known as a physical bus, similar to a square where those present communicate according to a certain priority criterion, Ethernet in most cases permits a point-to-point topology, similar to traditional correspondence, which enable configurations such as the star, tree and logic ring, created using components such as switches.
It is worth noting that “Ethernet” is a relatively complex technology, dating back to the 80s. If we look at the ISO/OSI stack, IEEE standardized the first two levels (Physical and Datalink levels), keeping them well partitioned and independent one from the other. IETF and the community that emerged within it developed many of the protocols that today are part of our Information Technology, and even our everyday life, gathering them into the Internet Protocol Suite or the TCP/IP stack. To fit the requirements of the automotive world, a physical level has been created for the purpose, in terms of cabling cost and electromagnetic compatibility, known commercially as BroadR-Reach, standardized in the 100Mbit version, in IEEE as 802.3bw and, most recently, in the 1Gbps version, as 802.3bp. In terms of cabling, both versions come as common UTPs (unshielded twisted pairs) of copper and chips that implement the physical level from different suppliers, such as Broadcom, NXP, Marvell, and Realtek. A further innovation is the creation of an interest group for a low-cost version (competitive with CAN and FlexRay), with low throughput (10Mbps) and that can admit a physical bus topology. The only limitation in the BroadR-Reach technology is the length of the cabling which, for reasons of compliance with the automotive standards, has been set at 15 m. This can become limiting in particular areas of heavy-duty road and off-road machines, leading to the use of additional network infrastructures such as repeaters.
In the agricultural sector, there are already efforts to translate the technological innovation brought by the Automotive Ethernet and in the Agricultural Industry Electronics Foundation (AEF) into the PT10 (High Speed ISOBUS, HSI) from February 2014. Since October 2008, AEF has been an international platform working on creating ISO 11783 (ISOBUS) standardization guidelines, but not only. The activities have moved to new areas such as electrification, camera systems, farm management information systems, wireless communication in the field and HSI.
The need to focus on next-generation networks has motivations that are partially similar to those of the automotive industry. On the one hand, the use of digital cameras can improve the quality of the work associated with the efficiency of some processes, in which the operator is able to monitor remotely specific phases, and to improve the controllability of the most delicate procedures in terms of functional safety, or to see otherwise blind spots during movements. On the other hand, the control of some tool-side procedures is already problematic in terms of the amount of data communicated via CAN, between ECUs, actuators and sensors in machines with a high number of rows to be magaged at rates of control cycles that are not particularly high.
The PT10’s efforts for now have focused on two areas: physical level and protocols. As far as the physical level, connectivity (back-compatibility as an essential point) and network lengths are the main points on the agenda. From the point of view of protocols, the spectrum of choices and problems is much wider and varied. The requirements that are influencing the choices from the perspective of protocols are basically safety, as a key component of the communication between tractor and tool in an open and dynamic environment, functional safety, as a fundamental component of the new network architecture that also influences the communication latency, which must be controlled and managed. The choice of protocols to be considered as the founding part of the HSI are based (also guided by the uniformity of the design, simulation and analysis tools) on those of the Automotive industry, such as the SOME/IP, defined in version 4.1 of AUTOSAR, a protocol oriented to control services, Audio Video Bridging (AVB), defined by IEEE as a set of protocols to have the so-called “lip sync” (the synchrony between video and audio), and its successor Time-Sensitive Network (TSN) still in its draft stage, in which the transmission of control data is explicitly set in scope; ISO13400, also known as Diagnostics over IP (DoIP), for diagnostic message management (e.g. WWH-OBD).
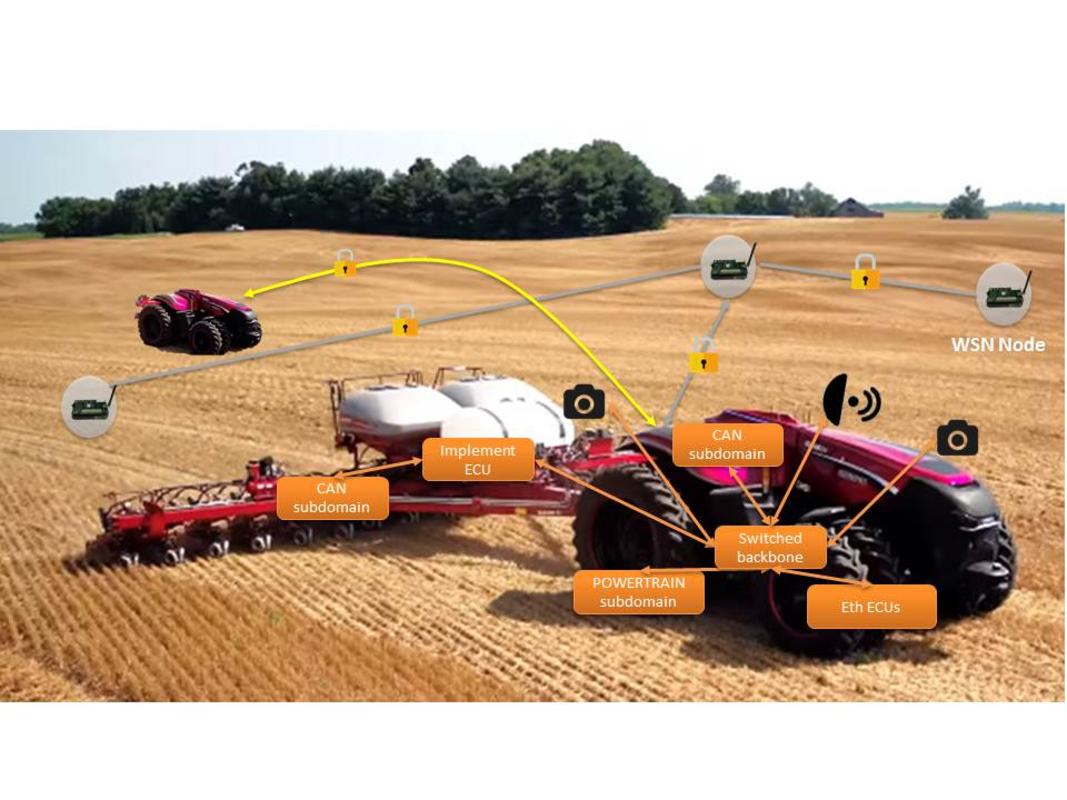
The landscape of the automotive Ethernet aimed at the world of agricultural machinery is still in the process of being defined. Certainly, there are use cases that strictly require the use of this new technology, not just as a new standardized tractor/tool communication protocol stack of several manufacturers, but also as a proprietary network (a subdomain). In the future, this may become the backbone that connects several subdomains, creating a system with architectures (service-oriented, cloud computing) that the IT world has become accustomed to for years. It is equally certain that in the future, more use cases will emerge. Just think of the Case IH Magnum autonomous tractor, whose media impact redefined the future of agricultural machinery. The autonomous sensor system that equips it makes the use of Automotive Ethernet indispensable, for decision distribution and work process control.
Globally, the success of the role outlined here for Ethernet is closely related to the standardization efforts that are taking place in AEF. These will enable the definition of best practices that can be adopted or adapted by tractor and implement manufacturers and by their supply chains.






{kind=link}
{kind=link}