
Robotic technologies for orchard harvesting
Robotic harvesting systems can ensure continuous operation and reduce dependence on labor, which is not always available. At the same time, these technologies enhance operator safety by avoiding or limiting exposure to risks
In recent decades, harvesting in orchards has undergone a radical transformation: the shift from mechanized harvesting, designed to facilitate manual labor, to robotic systems capable of partially (and in some cases fully) replacing the human operator. In many cases, traditional mechanical harvesting relies on equipment that shakes trunks or main branches to detach fruit, using repetitive and non-selective oscillations. This approach has undoubtedly improved speed and reduced harvesting costs, but it still presents some critical issues, such as the risk of damaging the fruit and the inevitability of non-scaled harvesting, which poorly suits delicate or high-value species, especially those intended for fresh consumption.
In contrast, harvesting robots do not operate through shaking or uncontrolled movements; they utilize cameras, sensors, and artificial intelligence algorithms to locate individual fruits, assess their ripeness, and, if necessary, gently pick them. Picking and depositing become operations executed with high precision, minimizing damage to the product. Although potentially slower than mechanical harvesting, robots can operate day and night, optimizing time and reducing reliance on labor, which is not always available. The main challenges to overcome include high costs, both for purchasing equipment and adapting the orchard (inter-row distances, pruning techniques, and training forms), as well as the technical complexity required to ensure the proper functioning of vision systems under highly variable light conditions and fruit ripeness levels.
The advantages of robotic harvesting. In addition to ideal non-stop operation, which is twenty-four hours a day, robotic harvesting reduces the impact of human labor variables. The selectivity of robots enables the collection of ripe fruits individually, reducing waste and preserving quality —a crucial aspect for crops intended for the fresh market, such as apples, pears, peaches, or citrus fruits. For detaching fruit from trees, robots can perform twisting actions, suitable for apples and other easily removable fruits, or employ mechanical cutting, which is more effective for citrus fruits with a resilient stem. However, to fully exploit these benefits, the orchard must be designed (or adapted) for automation: regular rows, appropriately managed canopies, and training forms compatible with robotic arms enhance visibility and accessibility of the fruits. Moreover, it is essential to consider the economic investment and plan logistics to ensure a continuous and orderly harvesting flow.
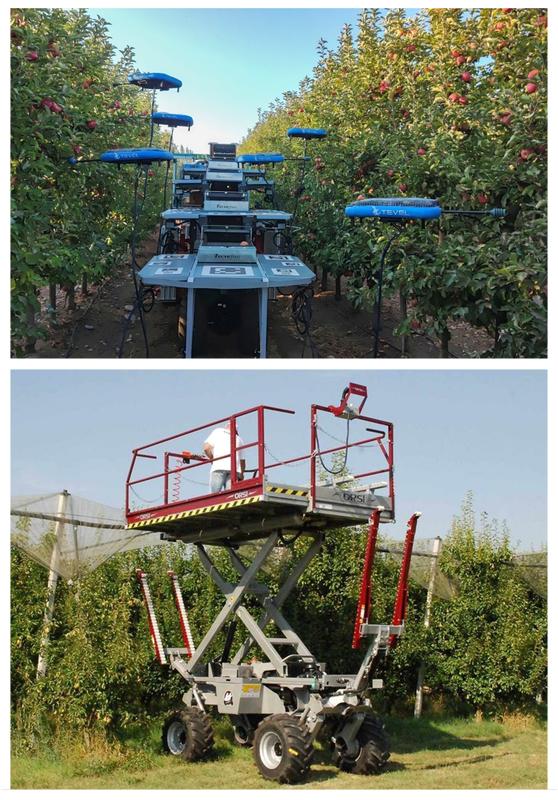
Robotic harvesting in apple orchards. Robotic apple harvesting represents one of the most advanced fields of applied research in fruit growing. The technological core of these systems consists of artificial vision sensors, which allow for the identification of fruits and assessment of their maturation stage. 2D and 3D cameras, often integrated with multispectral sensors, must ensure reliable recognition even in the presence of fruits partially covered by leaves and branches and/or under variable lighting conditions. To mitigate these challenges, orchards are increasingly cultivated in narrow-wall configurations, which enhances uniform fruit exposure and facilitates machine access.
Once the fruit is located, the robotic arm intervenes using gripping systems developed to preserve its integrity. Currently, the most common solutions are vacuum suction cups (which detach the individual fruit by creating a depression, then convey it through a collection tube) and soft silicone grips, designed to adapt to the object's surface without applying excessive pressure. The balance between force and precision is crucial to maintain high-quality standards, as the fresh market does not tolerate bruises or injuries.
Despite the advancements achieved, the execution speed remains a significant limitation: a human operator is generally quicker at picking and depositing the fruit. However, robotic systems offer a decisive advantage: the ability to operate continuously, even during nighttime, thus increasing overall harvesting efficiency.
Robotic harvesting in citrus orchards. The robotic harvesting of citrus fruits is based on systems similar to those used in apple orchards, which have been logically adapted to the specific characteristics of the crop. The greater irregularity of canopies, the presence of thorny branches, and the uneven distribution of fruit necessitate arms with a wide range of motion and gripping systems equipped with pressure sensors capable of minimizing damage during detachment. Post-harvest movement occurs through tubes or cushioned containers, sized appropriately to accommodate the characteristics of citrus.
Compared to apple orchards, automation in citrus orchards faces greater challenges, especially in fruit recognition and accessing those located deeper within the canopy. Therefore, the design of the orchard plays a critical role: regular rows, targeted pruning, and more open canopies improve visibility of the fruits and robot efficiency. The main advantages include reduced seasonal labor, selective collection of ripe fruits, and preservation of quality, resulting in less damage compared to traditional mechanical methods.
However, significant challenges remain: operational speed, which is still lower than that of traditional labor, and high initial investment, necessitating logistical planning and cultural adjustments to ensure optimal performance.
Robotic harvesting of berries. Although strawberries exhibit a delicateness and a growing system not comparable to other widely consumed fruit crops, the types of robots employed for harvesting show several technological similarities, particularly in the use of artificial vision and adaptive gripping principles.
The main challenge is not only the speed of operation but also the ability to work on small, delicate fruits that are not easily visible among vegetation. In this context, the design of the installation becomes crucial: regular rows, elevated or tunnel cultivation, and growing systems that promote orderly and well-exposed canopies significantly enhance visibility and accessibility.
Automation enables more frequent and selective harvests, reducing dependence on labor and ensuring greater quality uniformity; however, the inherent limitations regarding investment costs and slower speed compared to manual operators persist.
The robotic harvesting of strawberries relies on 2D and 3D artificial vision systems integrated with artificial intelligence algorithms, which are essential for identifying ripe fruits among dense plantations.
The product's fragility requires the use of very gentle gripping systems, such as soft grips, small-diameter suction cups, or controlled suction, which can detach the fruit without compromising its integrity. Robots operate on low rows, often close to the ground, and transfer the strawberries into belts or cushioned containers to limit bumps and compressions during movement.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}