
Tecnologie robotiche per la raccolta nel frutteto
I sistemi di raccolta robotizzata possono garantire un’operatività continua e ridurre la dipendenza dalla manodopera, non sempre disponibile. Al contempo, queste tecnologie migliorano la sicurezza degli operatori, evitando o comunque limitando l’esposizione ai rischi
Negli ultimi decenni la raccolta nei frutteti ha subito una trasformazione radicale: dalla raccolta meccanizzata, concepita per agevolare il lavoro manuale, si sta passando progressivamente a sistemi robotizzati in grado di sostituire in parte (e in qualche caso in toto) l’operatore umano. In molti casi, la raccolta meccanica tradizionale si avvale di attrezzature che scuotono i tronchi o le branche principali per provocare il distacco frutti, con oscillazioni ripetitive e poco selettive. Si è trattato di un approccio che ha indubbiamente migliorato la velocità e diminuito i costi di raccolta, ma che tuttora presenta alcune criticità, come ad esempio il rischio di danneggiamento dei frutti e l’inevitabilità di una raccolta non scalare, che mal si adatta a specie pregiate o delicate, specialmente se destinate al consumo fresco.
Al contrario, i robot da raccolta non agiscono per scuotimento o movimenti poco controllati, ma utilizzano videocamere, sensori e algoritmi di intelligenza artificiale per individuare i singoli frutti, valutarne il grado di maturazione e, nel caso, coglierli con la massima delicatezza. Prelievo e deposizione diventano operazioni effettuate con elevata precisione, che minimizzano i danni al prodotto. Pur essendo potenzialmente più lenti della raccolta meccanica, i robot possono operare di giorno e di notte, ottimizzando i tempi e riducendo la dipendenza dalla manodopera, non sempre disponibile. Tra le principali sfide da vincere ci sono i costi elevati, sia per l’acquisto dei macchinari che per l’adattamento del frutteto (distanze interfilare, tecniche di potatura, forme di allevamento), e la complessità tecnica necessaria a garantire il corretto funzionamento dei sistemi di visione artificiale in condizioni fortemente variabili di luce e di grado di maturazione dei frutti.
I vantaggi della raccolta robotizzata. Oltre ad un’operatività idealmente no-stop, ovvero ventiquattro ore al giorno, la raccolta robotizzata riduce il peso della variabile relativa al lavoro umano. La selettività dei robot permette di raccogliere frutti maturi singolarmente, riducendo scarti e preservando la qualità, aspetto cruciale per colture destinate al mercato fresco come mele, pere, pesche o agrumi. Per il distacco dei frutti dall’albero, i robot possono eseguire delle torsioni, operazione adatta alle mele e ad altri frutti per agevolare la rimozione, oppure possono ricorrere al taglio meccanico, più efficace per gli agrumi, che hanno un picciolo resistente. Per sfruttare appieno questi benefici, il frutteto deve però essere adeguatamente progettato (o adattato) per l’automazione: filari regolari, chiome opportunamente gestite e forme di allevamento compatibili con i bracci robotici migliorano visibilità e accessibilità dei frutti. È inoltre necessario considerare l’investimento economico e pianificare la logistica per garantire un flusso di raccolta continuo e ordinato.
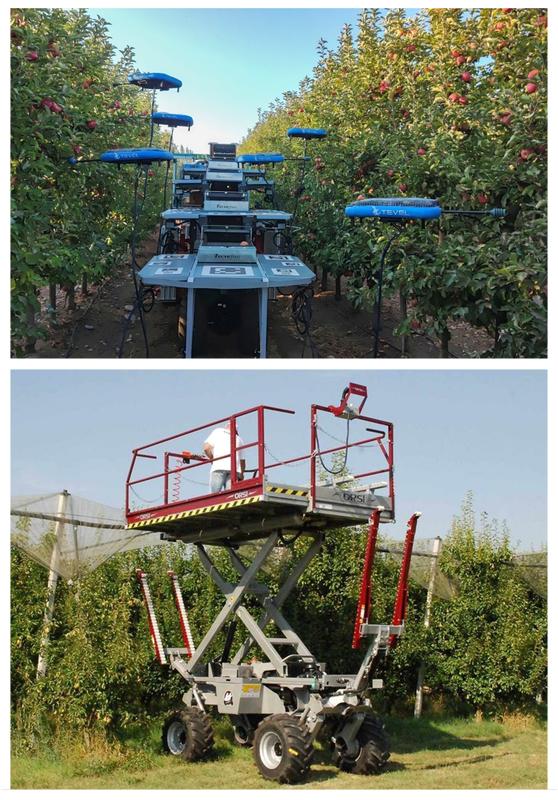
Raccolta robotizzata nel meleto. La raccolta robotizzata delle mele rappresenta uno dei campi più avanzati della ricerca applicata in frutticoltura. Il cuore tecnologico di questi sistemi è costituito dai sensori di visione artificiale, che consentono di individuare i frutti e valutarne lo stadio di maturazione. Le videocamere 2D e 3D, spesso integrate con sensori multispettrali, devono garantire un riconoscimento affidabile anche in presenza di frutti parzialmente coperti da foglie e rami e/o in condizioni di illuminazione variabili. Per ridurre tali criticità, gli impianti vengono sempre più spesso allevati a parete stretta, una configurazione che favorisce un’esposizione uniforme dei frutti e agevola l’intervento delle macchine.
Una volta localizzato il frutto, il braccio robotico interviene mediante sistemi di presa sviluppati per preservarne l’integrità. Le soluzioni attualmente più diffuse sono le ventose ad aspirazione (che staccano il singolo frutto creando una depressione, convogliandolo poi in un tubo di raccolta), e le pinze morbide in silicone, progettate per adattarsi alla superficie dell’oggetto senza esercitare pressioni eccessive. L’equilibrio tra forza e precisione è cruciale per mantenere standard qualitativi elevati, in quanto il mercato del fresco non tollera ammaccature o lesioni.
Nonostante i progressi raggiunti, la velocità di esecuzione rappresenta ancora la principale limitazione: un operatore umano risulta generalmente più rapido nel prelievo e nella deposizione del frutto. Tuttavia, i sistemi robotizzati offrono un vantaggio determinante: la possibilità di operare in modo continuativo, anche nelle ore notturne, aumentando così l’efficienza complessiva della raccolta.
Raccolta robotizzata nell’agrumeto. La raccolta robotizzata degli agrumi si fonda su sistemi analoghi a quelli impiegati nei meleti, logicamente adattati alle specificità della coltura. La maggiore irregolarità delle chiome, la presenza di rami spinosi e la distribuzione disomogenea dei frutti rendono necessari bracci con ampia escursione e sistemi di presa dotati di sensori di pressione, capaci di limitare i danni durante il distacco. La movimentazione post-raccolta avviene mediante tubi o contenitori ammortizzati, opportunamente dimensionati per le caratteristiche degli agrumi.
Rispetto al meleto, l’automazione negli agrumeti incontra difficoltà superiori, soprattutto per il riconoscimento dei frutti e l’agevole accesso a quelli più interni alla chioma. Per questo la progettazione dell’impianto assume un ruolo determinante: filari regolari, potature mirate e chiome più aperte migliorano la visibilità dei frutti e l’efficienza dei robot. I principali vantaggi includono la riduzione della manodopera stagionale, la raccolta selettiva dei frutti maturi e la preservazione della qualità, con minori danni rispetto ai metodi meccanici convenzionali.
Rimangono tuttavia criticità rilevanti: la velocità operativa, ancora inferiore a quella della manodopera tradizionale, e l’elevato investimento iniziale, che richiedono pianificazione logistica e adeguamenti colturali per garantire prestazioni ottimali.
Raccolta robotizzata dei piccoli frutti. Nonostante le fragole presentino una delicatezza e un sistema di allevamento non comparabile con altre colture di frutti di largo consumo, le tipologie di robot impiegate per la raccolta mostrano diverse similitudini tecnologiche, in particolare nell’uso della visione artificiale e nei principi di presa adattiva. La sfida principale non riguarda soltanto la velocità di esecuzione, ma anche la capacità di operare su frutti di piccole dimensioni, poco visibili tra la vegetazione e particolarmente delicati. In questo contesto, la progettazione dell’impianto diventa determinante: file regolari, coltivazione su rialzo o in tunnel e sistemi di allevamento che favoriscono chiome ordinate e ben esposte migliorano sensibilmente visibilità e accessibilità. L’automazione consente raccolte più frequenti e selettive, riducendo la dipendenza dalla manodopera e garantendo maggiore uniformità qualitativa, ma restano i limiti inerenti i costi di investimento e una velocità ancora inferiore rispetto agli operatori manuali.
La raccolta robotizzata delle fragole si basa su sistemi di visione artificiale 2D e 3D integrati con algoritmi di intelligenza artificiale indispensabili per individuare i frutti maturi tra piante fitte e ravvicinate. La fragilità del prodotto richiede l’uso di sistemi di presa molto delicati, come pinze morbide, ventose di piccolo diametro o aspirazione controllata, in grado di staccare il frutto senza comprometterne l’integrità. I robot operano su file basse, spesso in prossimità del suolo, e trasferiscono le fragole in nastri o contenitori ammortizzati per limitare urti e compressioni durante la movimentazione.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}