
Innovative solutions for mechanical weeding
Weed proliferation reduces crop yields, while progressive resistance to synthetic herbicides complicates control strategies. New-generation machines equipped with sensors and optical systems make mechanical weeding a highly sustainable and efficient solution
Weed control is one of the cornerstones of agriculture, as weeds are the main biotic factor reducing yields, and directly impacting crop productivity. For this reason agricultural systems have progressively resorted to synthetic herbicides, recognizing their crucial role in ensuring adequate production levels and supporting food needs. Over time, the use of herbicides has become the primary strategy for weed control, to the point of being in some cases the only solution used, even though it has encouraged the onset of resistance in various weed species. These phenomena are due to selective pressure resulting from the repeated use of the same active ingredients. In the medium to long term, this may compromise the effectiveness of interventions, making higher doses or alternative strategies necessary, with increasingly complex agronomic, economic, and environmental implications. For this reason the critical issues linked to the emergence of resistance and the growing regulatory and environmental pressure on the use of chemical herbicides are drawing attention back to integrated management strategies.
Mechanical weeding. This technical solution is generating renewed interest, as it may be used to support (and in some cases replace) chemical weed control. Mechanical weeding, in fact, consists of very superficial tillage of the soil (no more than 4-5 cm deep), with the aim of destroying or damaging the weed flora, thus reducing competition in the early stages of development of the main crop, without resorting to synthetic active ingredients. In addition to weed control, this approach can also provide additional agronomic benefits, such as reduced water evaporation by disrupting soil capillarity, improved soil aeration by breaking up the surface crust, improved solar heat penetration into the surface layers, and the ability to sow or incorporate fertilizers during tillage.
The operating machines utilized for mechanical weeding may basically be classified as either harrows or weeders. The former carry out a weed-removal and covering action by means of fixed elastic tines or those mounted on rotating elements. They can have working widths of up to 12 m and operate at speeds between 1 and 15 km/h. Their effect on weeds is greatest up to the second leaf stage, while it is practically nil on well-rooted weeds. Weeders, depending on the working parts, perform weed uprooting, cutting and covering actions by means of crust-breaking discs, small goose-foot plowshares, rotating elements with star-shaped discs or rubberized fingers. The working width ranges from 3 to 6 m, while the forward speed varies between 3 and 10 km/h.
Typically, harrows are used on crops sown in rows, especially autumn-winter cereals, while weeders are intended for crops sown in rows (corn, soybeans, sugar beet, vegetables, etc.).
The elastic tine harrow. This is a semi-mounted or trailed operating machine that draws tractive force from the coupled tractor, without any support of the motion from the mechanical PTO. Weed control involves eradicating and burying weeds, which are, importantly, still at the cotyledon stage of growth. The success of the weed control action of the harrow on autumn-winter cereals relies on a combination of two factors: on the one hand, the intervention must be performed when the seedlings of the crop to be preserved have a more developed and robust root system than that of the weeds; on the other, it relies on the typical tillering ability of cereals, which allows for compensation for any losses in the event that, in addition to weeds, plants of the cash crop are unfortunately also uprooted. The working parts of the harrow are made up of elastic steel teeth, characterized by a high ground clearance and an inter-row spacing of approximately 20-30 mm. In the main models, each tooth is attached to a tensioning spring, the pressure of which determines the degree of intensity of the weeding operation. A hydraulic balancing system acts on each frame of the harrow to maintain a constant effect of the elastic tines on the ground. The machine is completed by a third point with a slot for better adaptation to irregularities in the ground, a working depth control system (usually up to 3 cm) consisting of front and rear support wheels and a series of elastic "track eradicating" teeth installed behind the rear wheels.
The optimal adjustment of a harrow depends on the soil conditions and the growth stage of the crop. The intensity of the tines is adjusted manually, using hydraulic actuators or mechanical levers that vary the inclination of the tines with respect to the ground, taking into account the depth and working speed. The operator's experience is essential to select the most appropriate inclination of the elastic tines and the load of the relative tensioning springs based on the intensity of the infestation, the phenological stage of the crop and the soil moisture. Equally important is the choice of the machine's forward speed, because higher speeds result in greater uprooting efficiency, but also a greater risk of damage to the main crop.
The adjustments made to the machine normally remain constant throughout the entire operation, regardless of the degree of infestation present in the field. To overcome this limitation, solutions are being studied to modulate the spring load based on the spread of weeds, detected by proximity sensors, applying precision agriculture techniques.
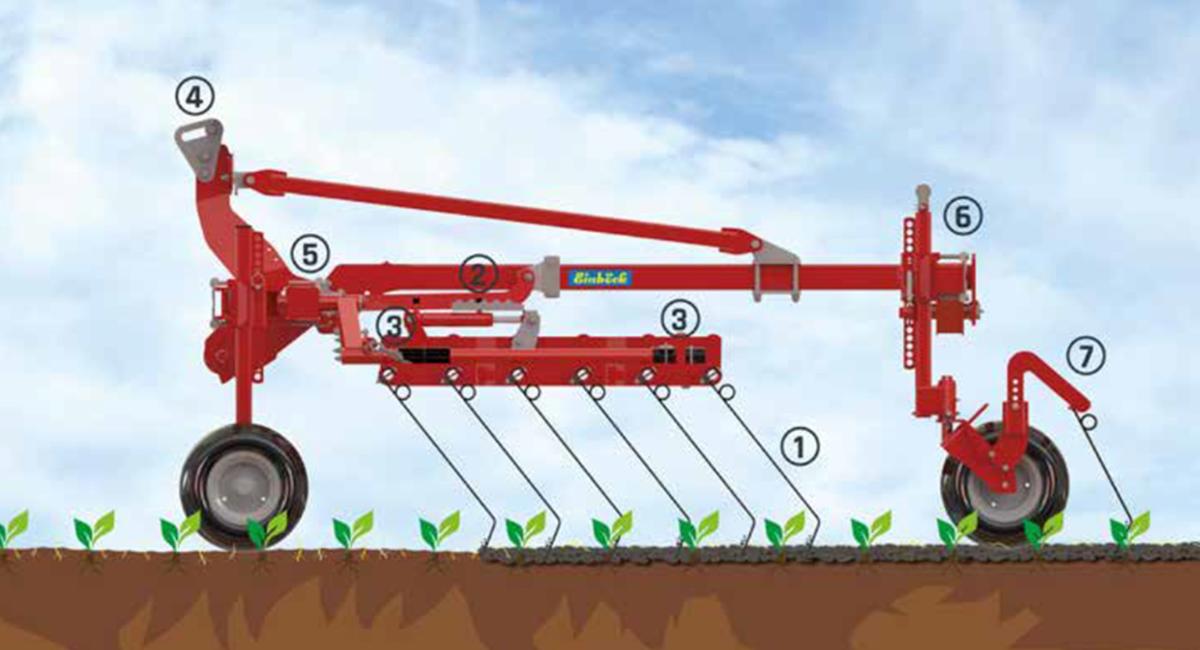
The precision weeder. A very interesting and innovative solution is the automatic guidance system with Row-Guard camera produced by the Austrian company Einböck which, combined with a translating frame, allows the rows of plants to be followed with millimetric precision during weeding. The high-resolution camera, positioned in front of the working parts, acquires and analyzes the image of the crop rows in real time according to two distinct operating modes: two-dimensional chromatic recognition, which distinguishes the crop from the soil and weeds based on color differences, and three-dimensional recognition, which identifies the row by detecting the difference in height between the crop and weeds. The signal processed by an electronic control unit is then transmitted to the translating frame, which is able to compensate for large lateral deviations (up to approximately 500 mm), ensuring constant centering of the cultivator with respect to the row. The device can recognize up to five rows simultaneously, adapting to different crops and different inter-row widths. To improve guidance precision when the cameras do not correctly detect the rows, the weeding units are equipped with special mechanical sensors. The operating interface is on a touch-screen ISOBUS terminal in the cabin, which allows the camera image to be viewed in real time, allowing the sensitivity and other recognition parameters to be adjusted, and the settings for different crops to be stored.
Advantages include increasing the precision of inter-row weeding, while at the same time reducing operator fatigue and improving hourly productivity, without compromising the quality of the work. Disadvantages are related to the correct adjustment of the camera, which depends substantially on the field conditions (brightness, sowing uniformity, phenological stage of the crop). However, the 3D mode and optional accessories (additional LED lighting or second camera) help to broaden the field of application and minimize critical operational issues.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}