
Guida automatica nelle coltivazioni specializzate con sistemi a rilevazione locale
Benchè il GPS RTK sia la soluzione tutt’oggi maggiormente applicata, per la precisa geolocalizzazione dinamica del macchinario agricolo nelle coltivazioni a filari, sono state sviluppate di recente alcune soluzioni alternative a rilevazione locale, che da sole o in collaborazione tra loro migliorano l’efficienza dell’intero sistema di navigazione, in una logica di “sensor fusion”
Semza dubbio, la soluzione di gran lunga più conosciuta per la geolocalizzazione è il GPS, che da tempo ormai è parte di tutti gli smartphone. Le più conosciute app di navigazione stradale, che in determinate circostanze si rivelano molto utili, si avvalgono proprio di un GPS “base” per determinare dinamicamente la posizione sulla strada di un veicolo, in riferimento ad una mappa stradale digitalizzata.
Lo stesso GPS, implementato con altri supporti locali, è il cuore di diverse soluzioni avanzate di georeferenziazione impiegate in agricoltura (ad esempio il GPS RTK, Real Time Kinematic), con cui è possibile ottenere una precisione molto elevata, intorno a ±2 cm, in condizioni operative ottimali.
In ogni caso, il GPS si basa sulla ricezione di segnali radio, trasmessi da una rete di satelliti in orbita intorno alla terra, a diverse migliaia di chilometri di altezza.
In estrema sintesi, la precisione della georeferenziazione è in funzione del numero di segnali ricevuti dai singoli satelliti; ci sono però alcune situazioni (tipicamente nelle aree confinate o chiuse, oppure dove sono presenti importanti ostacoli naturali) in cui la ricezione non è buona, quindi insufficiente per il livello di precisione necessario ad una corretta esecuzione di numerose lavorazioni agricole.
Piuttosto di recente, sono stati allora sviluppati sistemi alternativi, che fanno uso di sensori a rilevazione locale, in grado di sostituire efficacemente la classica soluzione basata sul GPS RTK, con un livello di precisione paragonabile.
Quelle che segue è una breve panoramica, sicuramente incompleta, di alcuni di essi, che fanno uso di sensori di funzionamento differenziato. Si tratta di opzioni particolarmente valide nelle coltivazioni specializzate a filari, dove la percorrenza delle macchine è obbligata nell’interfilare oppure, per quelle scavallanti, sopra il filare stesso. In tali casi, è relativamente semplice e vantaggioso concentrare le rilevazioni su elementi fissi della coltivazione, quali ad esempio i pali in un vigneto, oppure la chioma degli allevamenti frutticoli a palmetta.
Gregoire Easypilot. Basato su una videocamera 3D, il sistema Easypilot di Gregoire è in grado di gestire la guida automatica delle vendemmiatrici semoventi, con una precisione dichiarata di 3 cm, in qualsiasi condizione operativa (piena luce, oscurità, pioggia, neve, atmosfera polverosa, ecc).
Il segnale proveniente dalla videocamera viene poi elaborato tramite potenti algoritmi per generare una traccia virtuale che modellizza il filare; su questa base viene calcolato il percorso di guida ottimale.
Cuore del sistema è il sensore a infrarossi PMD (Photonic Mixer Device) grazie al quale vengono rilevati ad elevata frequenza (sino a 50 immagini al secondo) scene e oggetti con un’unica cattura tridimensionale, senza effetto mosso. Infatti, la scena da rilevare viene investita da una radiazione infrarossa, modulata e invisibile all’occhio umano che, riflettendosi sul bersaglio, viene captata dal sensore PMD, componendo quindi l’immagine.
Un’importante implementazione del sistema riguarda la presenza di sensori dinamici di inclinazione, che permettono di pilotare i cilindri dell’autolivellamento, per mantenere il corpo macchina in assetto orizzontale, in modo da seguire fedelmente lo sviluppo della vegetazione sui filari, indipendentemente dalla loro disposizione, cioè a rittochino (secondo la linea di massima pendenza del terreno), o a girapoggio (secondo le linee di livello), oppure in una condizione intermedia.
Nel dettaglio, questi sensori comprendono un giroscopio e un accelerometro triassiale, a formare un’unità IMU (Inertial Measurement Unit) a 6 assi, completata con opportuni filtri per eliminare possibili interferenze dovute a vibrazioni e/o urti con elementi estranei durante la normale operatività.
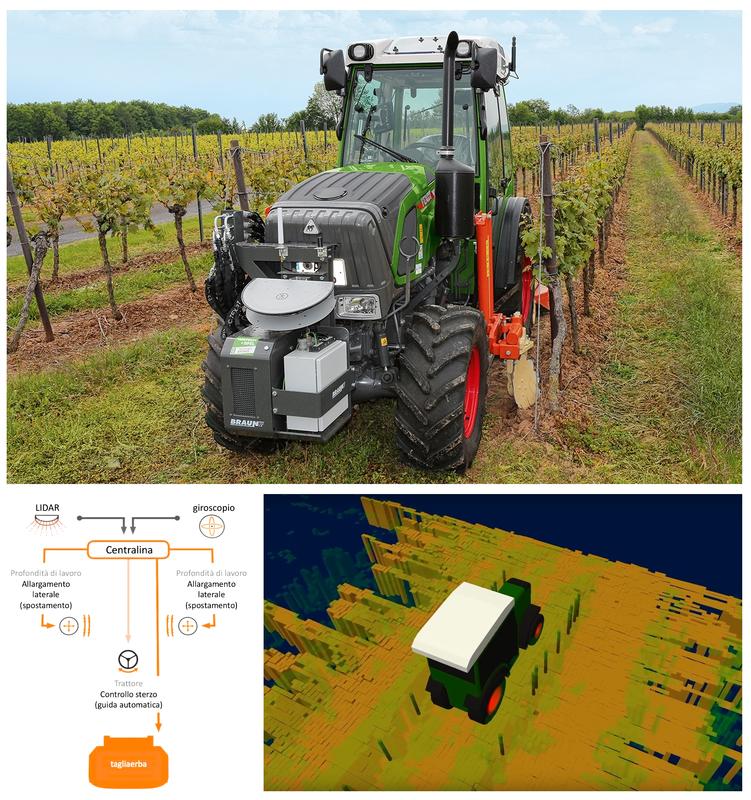
Fendt VPA (Vineyard Pilot Assistant). Con la collaborazione di Braun Maschinenbau GmbH, già nel 2019 Fendt ha presentato il VPA (Vineyard Pilot Assistant), un’interessante soluzione che è in grado controllare la combinazione trattore/attrezzo, con la contestuale guida automatica del trattore. Il sistema è stato inizialmente finalizzato per il diserbo meccanico nel sottofila, una lavorazione del vigneto che presenta notoriamente diverse criticità, ma può essere esteso ad altre operazioni.
Sul trattore viene installato un telaio intermedio messo a punto da Braun, che prevede il sollevamento verticale degli attrezzi montati, su entrambi i lati; in più, nella parte posteriore opera un gruppo trinciante, per realizzare lavorazioni combinate in un unico passaggio, fino a 8 km/h di velocità. I dati necessari per il controllo dell’attività degli attrezzi vengono acquisiti tramite un LIDAR e un giroscopio, poi elaborati da un‘unità di controllo e visualizzati su un terminale.
Nel dettaglio, il LIDAR rileva le caratteristiche dell’ambiente circostante, ovvero la vegetazione, il profilo del terreno e i pali, mentre il giroscopio monitora la posizione spaziale del trattore. L’insieme dei segnali elaborati serve per far viaggiare il trattore sulla traiettoria voluta, mentre le operatrici accoppiate vengono gestite in modo indipendente. In pratica, il sistema viene attivato all'inizio del filare, dopodiché gli attrezzi assumono automaticamente la posizione di lavoro ottimale; a fine filare, si collocano automaticamente in posizione di riposo.
COBO Vision Lane Navigation (VLN). Basato sulle tecniche proprie dell’intelligenza artificiale, è un sistema che applica una tecnologia definita “Digital twin”: trattore, attrezzo e vigneti vengono inizialmente digitalizzati, per consentire di effettuare test al simulatore; al raggiungimento di un soddisfacente livello di prestazioni, il sistema viene installato fisicamente sulle macchine, per una taratura finale da realizzare tramite approssimazioni successive.
Proprio per questo, non è necessario usare il GPS RTK, e nemmeno sensori LIDAR, radar o ad ultrasuoni per consentire una navigazione precisa tra i filari.
In più, l’intero sistema è di tipo attivo, ovvero fa uso di un attuatore elettrico al volante, per pilotare convenientemente la traiettoria del complesso trattore-attrezzatura al centro del filare o in prossimità delle pareti due filari adiacenti, in base alla lavorazione da effettuare e alle dimensioni dell’attrezzatura. Infatti, logicamente esigenza diversa è potare o defogliare il filare, piuttosto che trinciare erba e sarmenti nell’interfilare.
Elemento chiave del sistema VLN di COBO è una speciale videocamera che realizza una visione artificiale in tempo reale, in grado poi di pilotare lo sterzo, agendo sul volante, sulla base dei dati ricevuti. Questa soluzione risulta vantaggiosa, perché l’intera strumentazione non solo è installabile in retrofit su qualsiasi trattore, ma può anche essere trasferita da un mezzo ad un altro, anche diverso dal trattore, quindi una vendemmiatrice o una qualsiasi altra operatrice semovente.
Vinescout di Clemens. Sempre dedicato in particolare al vigneto, la francese Clemens ha messo a punto “Vinescout”, un sistema di controllo dello sterzo idraulico del trattore sul quale è installato, per una guida automatica negli interfilari. Analogamente alla soluzione COBO, ci si avvale di una stereocamera 3D che acquisisce in tempo reale immagini delle pareti dei filari e le analizza, intervenendo sullo sterzo per direzionare convenientemente l’insieme trattore-attrezzatura. Un segnale acustico avvisa con congruo anticipo il conducente dell’approssimarsi della fine del filare, per permettere di riprendere il controllo manuale, in modo da passare al filare successivo. Anche questa apparecchiatura, che è parimenti in grado di funzionare in condizioni di scarsa visibilità, è versatile, nel senso che oltre ai trattori può essere applicata ad altre macchine operanti nel vigneto, come ad esempio la vendemmiatrice.
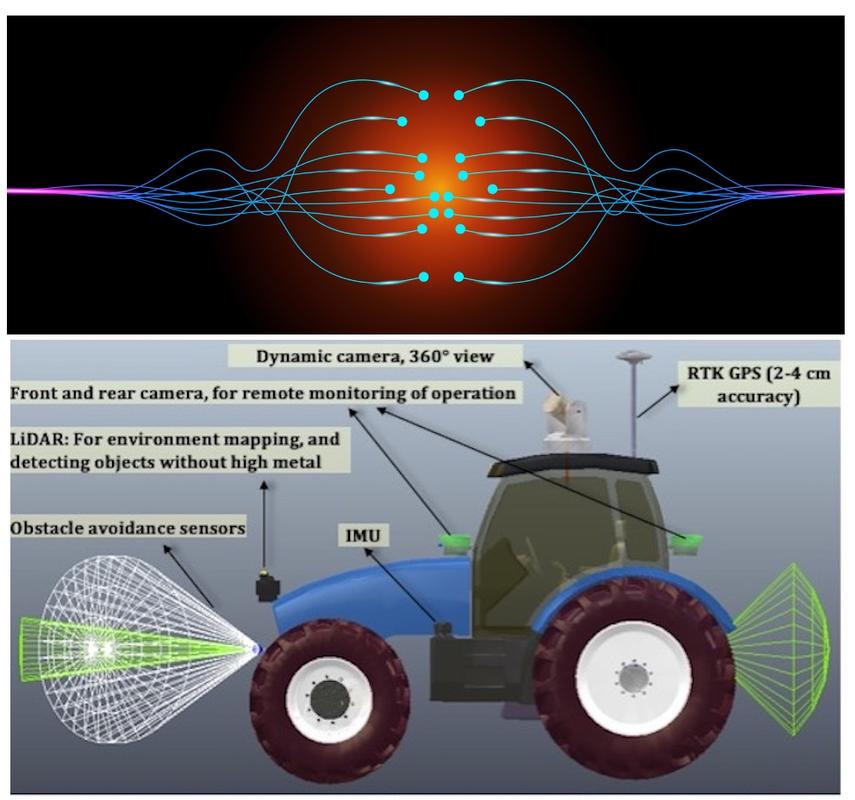
La sensor fusion. L’applicazione della sensor fusion è ormai la prassi per i trattori robotizzati, e ancor più per i robot agricoli veri e propri. Il suo scopo è quello di acquisire, elaborare e adattare le informazioni provenienti dai diversi sensori, come GPS, LiDAR, ad infrarossi, ad ultrasuoni, giroscopi, accelerometri, ecc., installati su un veicolo, per un’analisi più precisa e accurata dei parametri da analizzare durante la cosiddetta “navigazione”.
I singoli sensori effettuano efficacemente rilevamenti specifici, ma con alcuni insormontabili limiti funzionali per cui sono stati progettati: un radar, ad esempio, rileva velocità e distanze, ma non è in grado di marcare gli ostacoli fissi, né riconoscere i colori. Le videocamere fanno invece l’esatto opposto. Grazie alla stretta interconnessione dei dati ottenuti, la sensor fusion si rivela efficace, basandosi sui concetti di ridondanza, ricalibrazione e sincronizzazione.
Il tutto però non è esente da rischi, perché ricevendo informazioni da più sensori, il rilevamento scorretto da parte di uno di essi può tramutarsi in una risposta tardiva o mal ponderata dell’intero sistema; in questi casi, la ridondanza evita il suo collasso. Inoltre, la calibrazione e la sincronizzazione dei sensori devono avvenire in continuo e in modo automatico, ripetuto con regolarità per evitare possibili errori di rilevazione. Dovrebbe poi essere inclusa una funzione per invalidare eventuali input non corretti, escludendoli dal processo decisionale, per evitare un disallineamento del sistema.
L’interconnessione ha però un altro rischio da considerare, che riguarda la cybersecurity: un sistema con più fonti che sono indipendenti è infatti meno soggetto a criticità rispetto alla sensor fusion. In effetti un potenziale attaccante può colpire il processore alla base dell’elaborazione complessiva dei dati e mettere fuori uso l’intero asset.
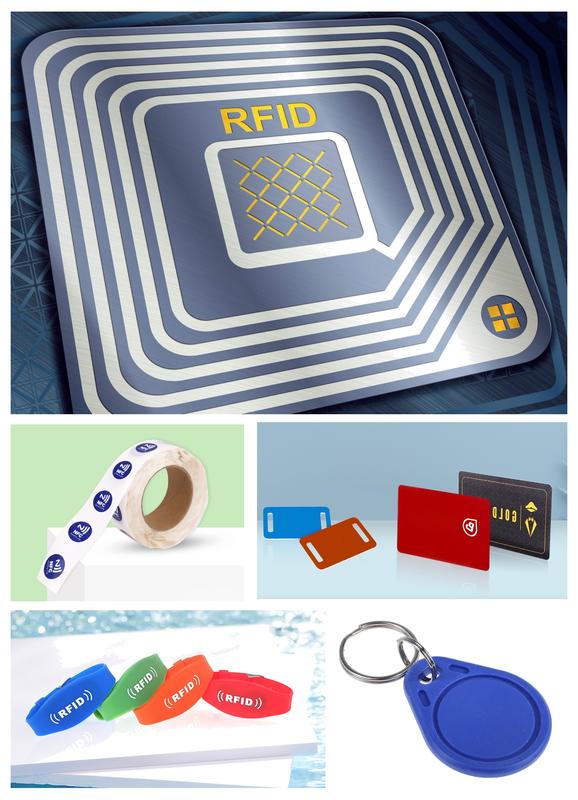
I tag RFID nel vigneto
Sono tra noi, di uso quotidiano, ma quasi non ce ne accorgiamo. Sono i Tag RFID, dove “tag” è un termine inglese che significa “etichettare”, da cui il neologismo in italiano “taggare” (terribile, a parere di chi scrive…). Molto comune è l’impiego di questo termine sui social media, dove si associa un’etichetta ad un contenuto pubblicato o in fase di condivisione. RFID, è invece l’acronimo inglese di Radio Frequency IDentification, ovvero una tecnologia di identificazione automatica digitale, che consente la rilevazione univoca di oggetti, ma anche persone e animali, sia statici che in movimento, sfruttando le proprietà dei campi elettromagnetici. L’RFID comprende un insieme di soluzioni hardware e software finalizzate a raccogliere informazioni e scambiarle a distanza, in modo automatico e istantaneo. Viene applicato molto spesso anche per assicurare la tracciabilità di un prodotto nella rispettiva filiera, dell’approvvigionamento della o delle materie prime, sino alla vendita al dettaglio. L’insieme di questi passaggi è conosciuto come “Supply chain”. In pratica, l’hardware del sistema RFID raccoglie i dati che riguardano la posizione del prodotto in un determinato momento e durante tutto il suo ciclo di vita, consentendo al software di riconoscerlo e fornire agli amministratori una visione completa dello stato di avanzamento del processo produttivo, distributivo e di vendita. La comunicazione avviene quindi via radio, tramite onde a frequenza diversa. Senza entrare nel dettaglio, si va dagli RFID a bassa frequenza, ovvero che lavorano tra 125 e 134,2 kHz, per una distanza di lettura molto limitata, da pochi centimetri fino a un metro al massimo, fino a quelli ad altissima frequenza (intervallo: 2,45 – 5,8 GHz), il cui campo d’azione si amplia sino a 100 m. I tag RFID sono di diverso tipo, ovvero passivi, semipassivi e attivi. Nel primo caso, non c’è bisogno di una fonte di alimentazione elettrica (cioè una batteria). Quando un lettore RFID si avvicina al tag passivo, le antenne di quest’ultimo convertono l'energia delle onde elettromagnetiche ricevute in energia elettrica: ciò attiva il chip del tag RFID nell’inviare i dati. I vantaggi riguardano le dimensioni e il peso contenuti, una lunga durata (oltre 10 anni), assenza di manutenzione e quindi basso costo. Il principale svantaggio riguarda proprio l’assenza di un’alimentazione elettrica autonoma, che ne limita la distanza di lettura e che quindi necessita di lettori di potenza elevata.
All’opposto, ci sono i tag RFID attivi. Hanno una batteria integrata, e per questo i loro segnali sono captabili a diverse decine di metri di distanza. Per contro, sono logicamente più ingombranti di quelli passivi, hanno un costo maggiore e il tempo di servizio non è teoricamente eterno, ma limitato dalla durata della batteria.
I tag RFID semipassivi integrano i vantaggi dei due tipi precedenti, nel senso che il dispositivo rimane in stand-by (quindi consuma pochissima energia elettrica) finché non entra nel campo di captazione del lettore. Hanno inoltre una velocità di risposta più rapida dei tag RFID passivi e una migliore efficienza. Viceversa, rispetto ai tag attivi quelli semi-attivi consumano meno energia. Il principale svantaggio è il costo elevato.
Tra le numerose applicazioni è compreso anche il monitoraggio della posizione di oggetti, come ad esempio i pali di un vigneto. Pertanto, applicando ad ogni palo (che è statico) un tag RFID che contenga la relativa georeferenziazione, è possibile creare un’efficiente rete di localizzazione di un altro elemento, ad esempio il trattore (che si muove, quindi è dinamico), dotato di un lettore RFID. In tal modo, ci si svincola completamente dalla necessità di usufruire del GPS RTK, che essendo un sistema basato sulla comunicazione radio via satellite potrebbe essere soggetto ad eventuali blackout che ne potrebbero vanificare completamente il beneficio operativo.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}