
After-market for automated or assisted driving
From the early American automated steering systems dating back a century to the most modern fully automated devices with the ability to control operations even from a remote location, the agricultural machinery industry has invested heavily in automated driving technology, which can be applied to tractors and self-propelled machines
Driving an agricultural vehicle is an extremely challenging task: the operator must follow a path so as not to flatten the crops, minimize overlaps, and avoid jumps between adjacent passes, while checking the correct operation of the equipment. All this requires constant attention that leads to fatigue and drops in driving performance, especially in low visibility conditions (at night or in the presence of dust). For these reasons, driver assistance systems have always been the subject of research in the field of agricultural engineering. The first “automatic steering” patents applied to tractors in the United States date back to more than a century ago (Snyder, 1885; Rohan, 1909; Cuddy, 1914; Whipple, 1919; Willrodt, 1924). These were wheel based systems, connected to the steering control, which allowed the tractor to follow the previous furrow while plowing. Since then, in the USA alone there are more than one hundred patents relating to automatic driving in agriculture; however, it is only from the mid-1990s that the launch of the first Global Navigation Satellite System (GNSS), the GPS, enabled the real revolution in this area.
Driver assistance in agriculture
In general, a driver-assistance systems helps to make contiguous passes while avoiding overlaps or jumps between two consecutive passes. This is crucial in the distribution of fertilizers and, above all, plant protection products, where untreated areas cause a decline in production and the spread of disease and pathogens, while overlaps result in loss of operational capacity and consequent increase in consumption and costs, phytotoxicity and pollution due to excessive dosage. In addition, the ability to record and post-process geolocation data enables the use of this data for subsequent applications, such as the preparation of fertilizer and pesticide application maps, and the consequent real-time adjustment of fertilizer spreaders and sprayers (variable dose delivery systems).
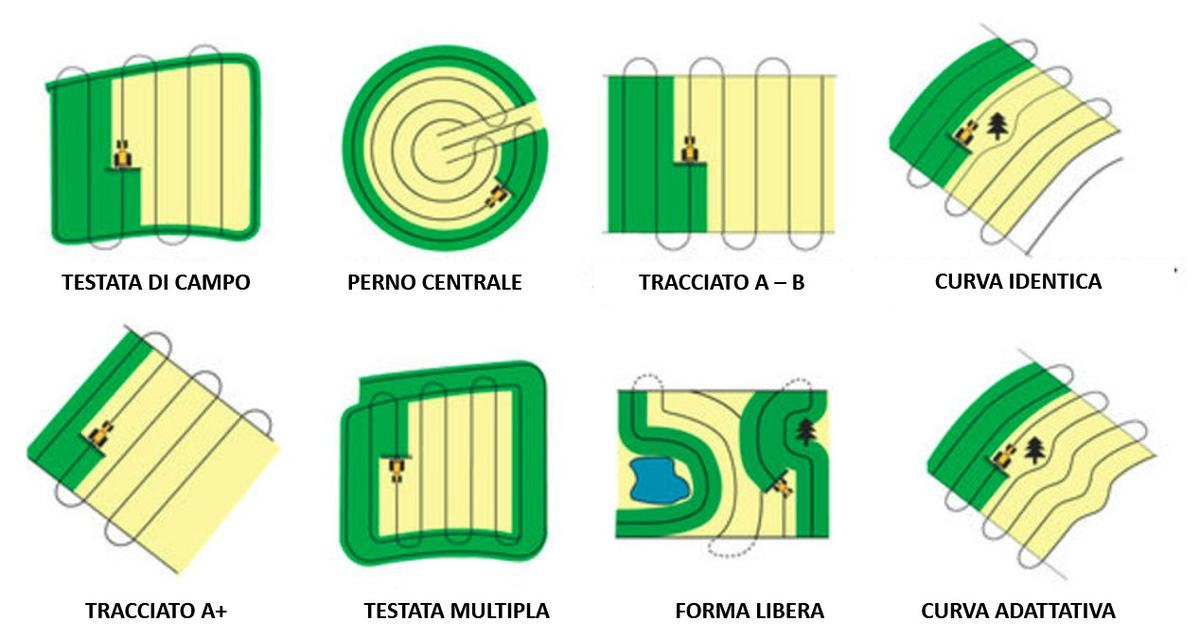
The different ways of making passes depend on the shape of the field and the presence of obstacles. Each of these involves the need to follow faithfully and at the right distance the previous pass; in the absence of driver-assistance systems, the overlap size can exceed 15%. The first satellite driving assistance systems were marketed around 1995. There are currently several systems available, obviously marked by increasing costs and functionality, and they can also be installed on tractors after-market.
Types of driver-assistance systems
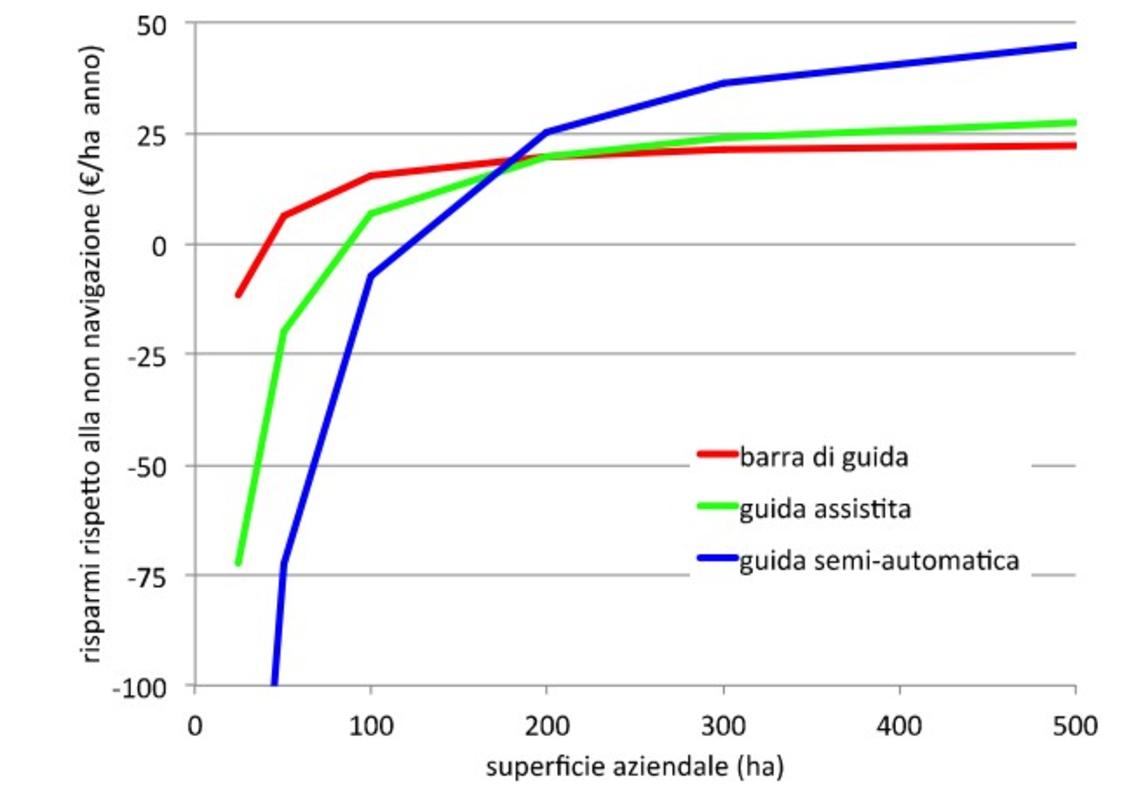
Driver-assistance systems can be categorized in the following types: guiding bar, driver-assistance and semi-automatic driving. The systems based on a guiding bar feature a GPS receiver connected to a user interface that can display information about any deviation from the set path and receive input from the user, such as the distance between two passes (offset) relative to the position of the first driving line (usually a field margin), which is traced “manually” by the tractor driver. In practice, the system is the evolution of the mechanical or foam row marker, and shows the driver the information about his position via an LED bar, often supplemented with a graphic display. In the simplest solution, the driver follows the system’s visual directions and corrects the trajectory; the accuracy varies generally from 15 to 30 cm and allows an increase in working speed of up to 13% compared to traditional row markers. A more advanced solution consists of installing a motorized actuator acting on the steering wheel by means of a rubber roller in contact with it during the operation, correcting the deviations from the trajectory. This system reduces the operator’s fatigue by allowing him to focus on the implement rather than following the bar markings, and can be easily and quickly installed on various tractors; like the manual guiding bar, it works well for operations that require moderate precision, such as soil processing, fertilization and treatments.
Semi-automatic driving systems control the steering of the vehicle faster and more accurately, acting on the steering column or directly on the hydraulic system in fitted machines; the driver can take control of the vehicle at any time and turn around the vehicle simply by acting on the steering wheel. The highest level of automation is available on equipped tractors, with trajectory calculations and automatic turnaround, as well as returning to where the job was suspended.
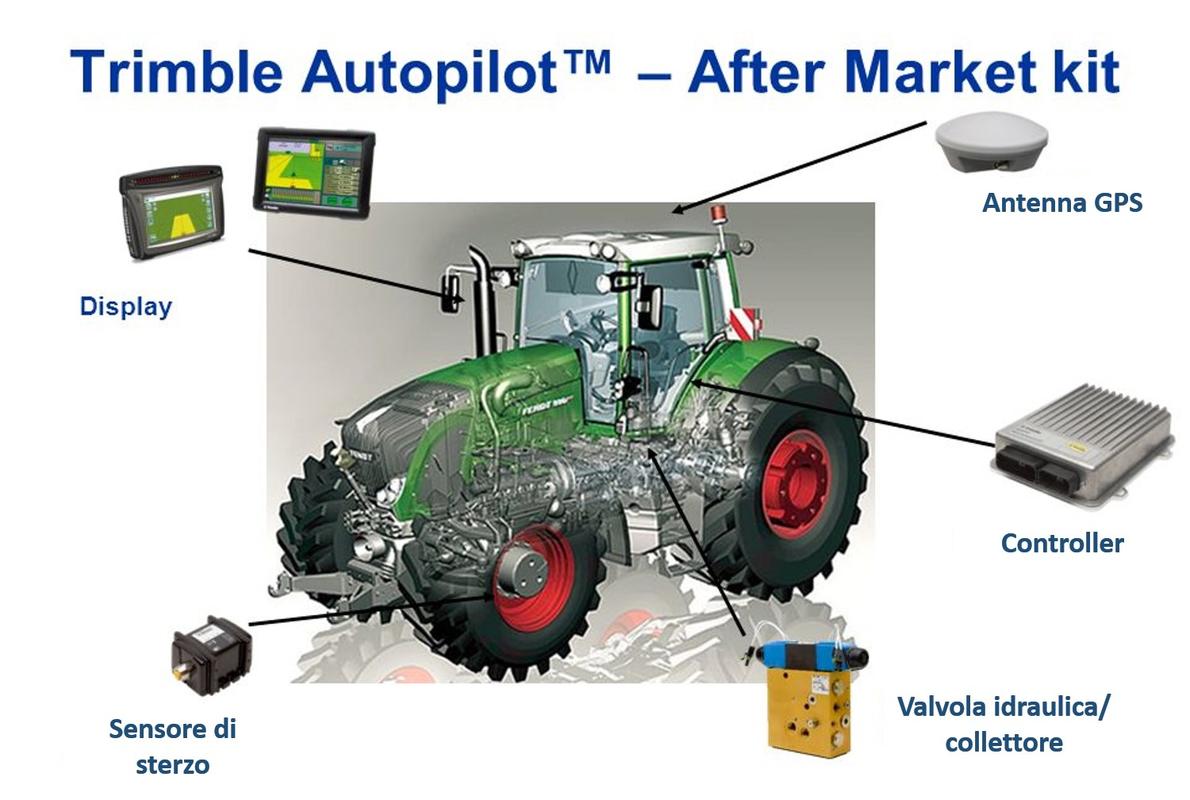
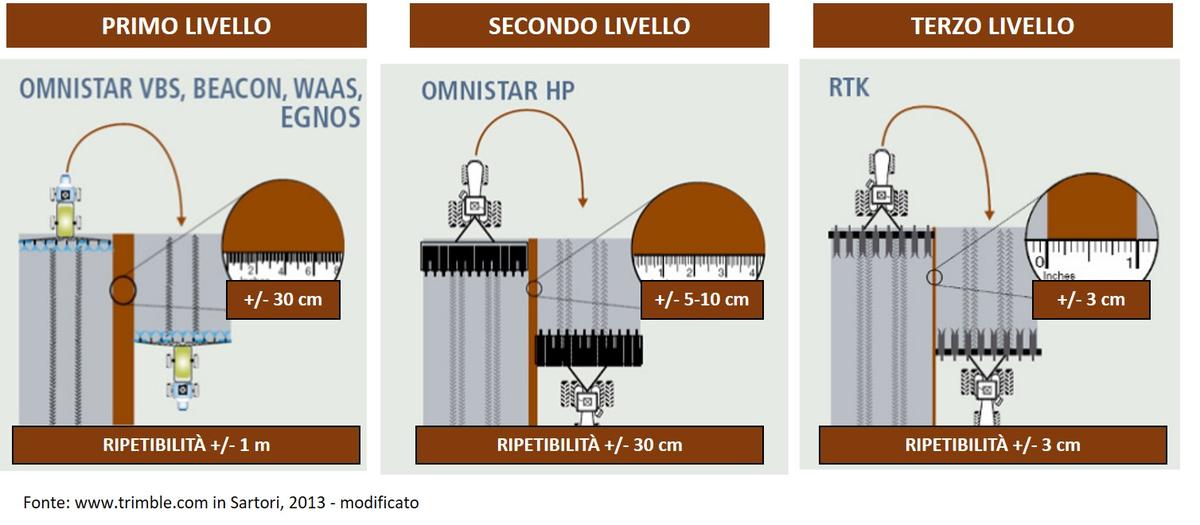
The system components are: 1) control and recording unit for position and trajectory data; 2) cabin display, to show the relative position of the tractor with respect to the set trajectory and the contiguous passes, and other data on the work being done; 3) steering sensor located on the front axle or directly on the steering wheel (outer cylinder or hydraulic box) to detect the angle of the axle with respect to the forward direction; 4) electrohydraulic actuator to control the steering system. The performance of the different semi-automatic driving levels depends on the GPS hardware and the related differential correction system, which determines the degree of accuracy and repeatability of the positioning data: they range from the simplest systems that use differential correction with sub-metric accuracy to receivers subscribed to satellite correction services that can guarantee an accuracy of ± 5 cm, all the way to systems with differential correction from a base station (RTK) located at a maximum distance of 3-4 km, ensuring an accuracy and repeatability of ± 2 cm. At this level, the paths of a crop operation can be stored and used in later operations (e.g. weeding), or to return to the point where the operation was suspended with the same positioning accuracy. The more advanced systems also allow for transverse gradient correction and alignment control of the equipment attached to the tractor both passively (the tractor makes corrections) and actively (the system controls the lateral movement of the equipment).
From an economic point of view, the benefits of the system obviously depend on the initial cost and the farm’s surface area.
Benefits
In summary, the benefits of satellite technology applied to driver assistance for agricultural vehicles can be shown as follows. Firstly, there is an increase in work capacity due to higher speed and accuracy (+ 10-13%), combined with a greater effective width (from 5% to 0% overlaps, to be compared with 10-15% without a satellite guide). There are also advantages that are not directly quantifiable in economic terms, such as the ability to work comfortably even in low visibility conditions (fog, dust, night-time) that extends the working hours, in addition to the operator’s reduced physical and mental fatigue. A further added value, especially when adopting high-level technologies (RTK), is provided by additional functions such as data storage for post-processing, processed surface calculations, crop mapping in conjunction with other sensors, headland management, return to job suspension point, the possibility to manage prescription maps for fertilization and localized or variable dosage plant protection product application.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}