
Production Mapping Systems
Production maps, developed with data collected during the harvest of products, are among the basics of precision agriculture. They provide a valuable opportunity to fully detect field variability in order to achieve optimal management of production factors, adopting the so-called "variable rate" distribution
The primary purpose of production mapping is to provide or increase knowledge concerning field variability. The aim is: to check if there is a different production potential in various sub-areas of the plot, and whether or not this could result in the profitable application of the techniques of differentiated tillage or variable rate distribution (VRT); to calculate the nutrient withdrawals related to the harvest of products (but also of by-products) in order to restore an optimal situation; to evaluate the possible effects of variable rate application in the distribution of different inputs; to perform a harvest differentiated in time and/or space, which is a valuable option for example in the grape harvest, to manage grapes with different degrees of ripeness separately. As far as cereals are concerned (and therefore harvesting by combine harvesters), production mapping has been used since the 1980s in the USA and later spread to other cereal-growing areas in the world. In Italy, the first tests of commercial versions of these systems were carried out in the second half of the '90s. They were kits to be retrofitted on combine harvesters already operating on the farm, which included some sensors, the satellite receiver, and the computerized control unit to be installed in the cab. For some time now, these systems have been available as an option on brand new models.
In the United States, an estimated 60% of farmers currently make some kind of use of production mapping data. Whereas, in Italy, an estimated 1,600 systems are operating on farms, covering only 10% of the Italian cereal-growing area. Although constantly increasing, these numbers are still small, even though this equipment is now widely affordable in terms of costs (in the order of a few thousand euros), which in any case represent only 1-2% of the investment cost of a combine harvester of average working capacity. In high-productivity models, these systems are generally already fitted, and sales networks tend to offer them as a "free option" to replace or supplement the ever-present " rebate" that is common practice in our country in the agricultural machinery sector.
Operation
The production mapping system installed on combined harvesters is mainly based on the following: sensors for measuring the quantity (in mass or volume) and humidity of the harvested product; GNSS satellite receiver for geolocation; sensors for measuring the quality parameters of the harvested product.
Sampling data on the quantity, moisture content and characteristics of the harvested crop are acquired at high frequency and georeferenced by the satellite receiver. They are then referred to as the plots into which the field is divided. For efficient mapping, reference to individual areas is essential: It is, therefore, necessary to know both the actual width and the length of the working area, which depends on the machine's forward speed. In fact, the exact working width rarely coincides with the maximum width of the combine's cutter bar because when operated manually, the operator always keeps a safety clearance. This is also the case with field closures.
The sensors
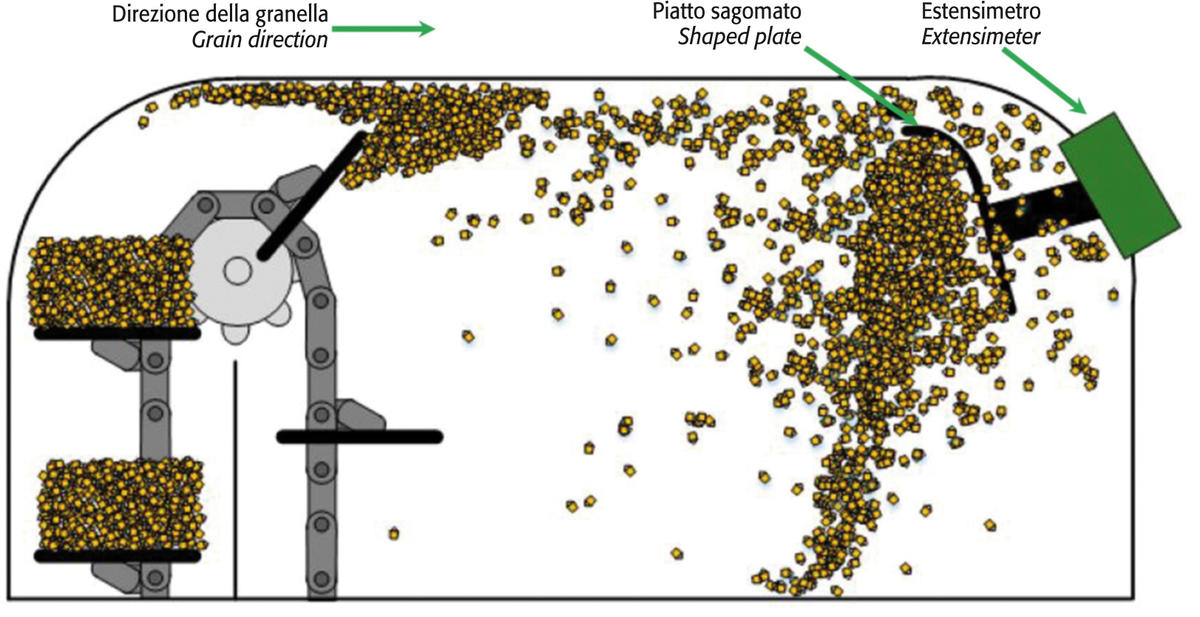
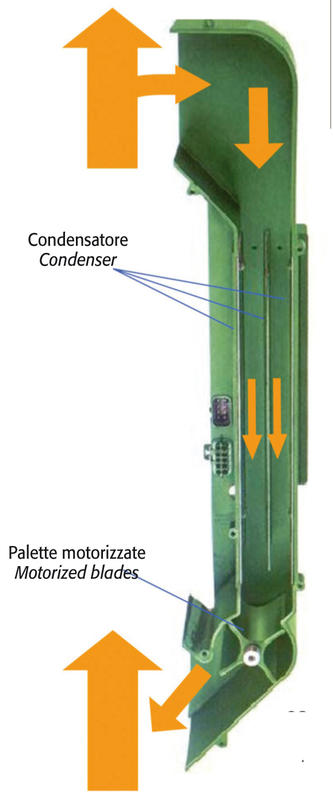
Sensors (usually ultrasonic) are then installed on the header to detect the degree of boom engagement with a high sampling rate. For headers for species cultivated in rows (e.g., maize), sensors are instead of the "on-off" type, capable of monitoring the operational status of each individual row. Consequently, the average effective width measured over the sampling interval represents one of the sides of the plot, while the length is determined by the product of the effective forward speed and the time of sampling. The rate can always be measured by the satellite receiver (if properly corrected) or by radar or ultrasonic devices installed on the machine. Crop quantity sensors measure the flow of threshed grain. They can operate on an impact or volume basis. The formers consist of a shaped plate connected to a strain gauge; the assembly is located at the top end of the elevator that transports the cleaned grain from the fan to the hopper in the mid-part of the machine. The grain thrown from the elevator hits the plate, and the strain gauge converts the energy of the impact into an electrical signal correlated with the amount of product flow. Instead, volumetric sensors rely on counting, also with reference to time, the number of certain constant quantities of grain moved by the elevator. The individual volumes are measured by optical sensors which check the filling level of the elevator pallets. Unlike impact sensors, the determination of caryopsis density is required to calculate the amount of product flow correctly. Moisture sensors allow the characterization of plot production in terms of dry matter. Usually, they consist of plate capacitors, in which the grain acts as a dielectric. As the dielectric constant varies with the moisture content, the condenser capacitance varies according to the moisture content of the grain, thus obtaining a relatively reliable figure. These sensors currently work discontinuously, thanks to paddle filling/emptying systems that keep the grain between the condenser's armatures (walls) for the time needed to take the measurement. Finally, a NIRs sensor, capable of non-destructively detecting moisture, protein, and fat content, is typically used to measure crop quality. It is usually installed either on the elevator (so that a continuous measurement can be taken) or inside a detection chamber at the top of the elevator. In this case, as with the humidity sensor, the chamber is alternately filled and emptied in order to obtain a discontinuous reading. In order to obtain correct mappings (with a system-wide accuracy of between 3.5 and 5%), it is necessary to calibrate the sensors, specifically the humidity sensor, periodically.
The satellite receiver
It must have high accuracy, decametric or even centimetric. This requirement is already met if the machine is equipped with semi-automatic guidance, but RTK differential correction is a must in this case. The receiver antenna must be fixed along the vertical median axis of the vehicle: it is usually located on the roof of the driver's cab, which provides the benefit of having no obstacles to receiving the signal emitted by the satellites. A further problem to be taken into account is the time interval (the "delay") between cutting the product and its processing up to the flow sensor, which, it is worth remembering, is located at the top of the elevator. This time delay, typically 10-20 seconds, is managed (and corrected) via software by the data processing programs generating the production maps. A further aspect to be taken into account is the advisability of keeping the feed rate constant, as sudden changes in feed rate can result in over-or underestimates of yield. Moreover, daily variations in grain moisture can be another source of error, especially for rice. At the beginning of the day, the kernels may be wet on the outside, so the sensor measures significantly different values than during the hottest hours of the day. These issues are still manageable either through the system software and/or the operator's best practices. Therefore, production mapping is the basis for the construction of prescription maps required for the variable rate distribution of fertilizers (or other inputs) according to the real needs of the crop and only in those areas of the field where maximum technical and economic efficiency can be achieved. Furthermore, production mapping can be good support for safe and reliable product traceability: the satellite receiver certifies the exact date, time and position of harvesting and provides accurate product characterization using data from yield, moisture, and grain quality sensors.








{kind=link}
{kind=link}
{kind=link}