
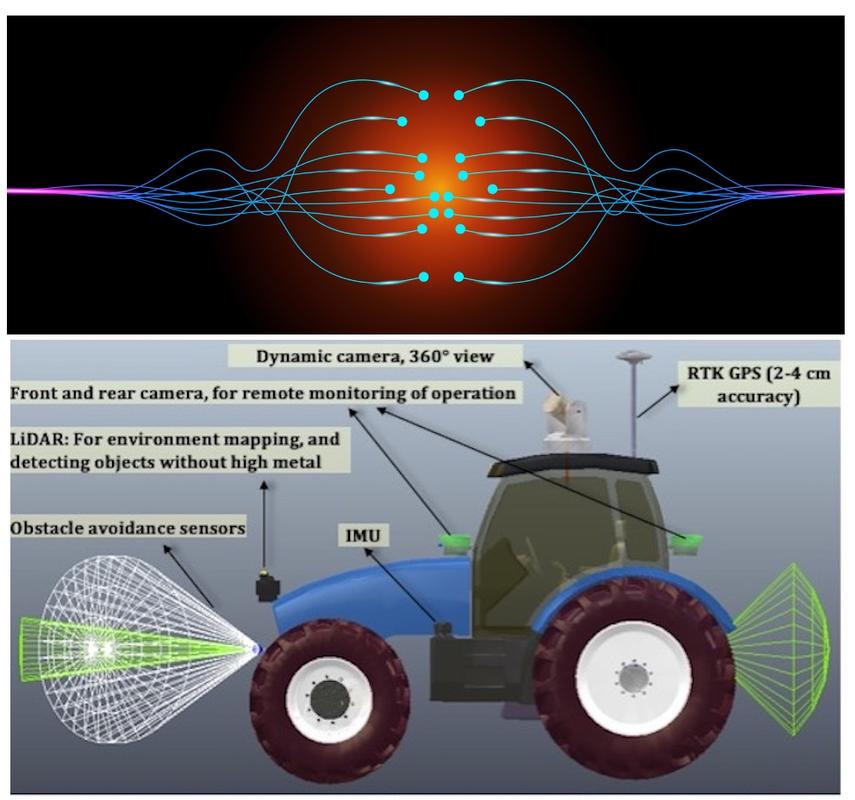
Automatic drive in specialized crops with local detection systems
RTK GPS is the most widely used technology for the precise dynamic geolocation of agricultural machinery in row crops. Still, recently, some alternative local detection solutions have been developed, which, alone or in combination with each other, improve the efficiency of the entire navigation system by following a "sensor fusion" approach
most widely known solution for geolocation is GPS, which has been a feature of all smartphones for some time now. The most popular road navigation apps, which are very useful in certain circumstances, use basic GPS to dynamically determine the position of a vehicle on the road on a digital road map. When implemented with other local support, GPS is also at the heart of several advanced georeferencing solutions used in agriculture (GRP RTK, Real Time Kinematic), which can achieve extremely high accuracy, around ±2 cm, under optimal operating conditions.
That said, GPS is based on receiving radio signals sent by a network of satellites orbiting the Earth at an altitude of several thousand kilometers. Therefore, the accuracy of georeferencing depends on the number of signals received from individual satellites. However, there are some situations (typically in confined or closed areas or where there are significant natural obstacles) in which reception is poor and insufficient for the level of accuracy required for the correct execution of many agricultural tasks.
Alternative systems have recently been developed that use local detection sensors, which can effectively replace the classic RTK GPS solution with a comparable level of accuracy.
The following is a brief overview, which is certainly incomplete, of some of these systems, which use sensors with different modes of operation. These options are particularly useful in specialized row crops, where machines must travel between rows or, in the case of straddle tractors, over the rows themselves. In such cases, it is relatively simple and advantageous to concentrate the detections on fixed elements of the crop, such as the posts of a vineyard or the canopy of palmette fruit trees.
Gregoire Easypilot. Built around a 3D camera, Gregoire's Easypilot system can automatically guide self-propelled grape harvesters with a claimed accuracy of 3 cm in all operating conditions (full light, darkness, rain, snow, dusty atmosphere, etc.).
Powerful algorithms then process the signal from the camera to generate a virtual track that models the row; the optimal driving route is calculated on this basis. At the heart of the system lies the PMD (Photonic Mixer Device) infrared sensor, which detects objects and scenes at high frequency (up to 50 images per second) with a single three-dimensional capture without any blurring. The scene to be detected is illuminated with infrared light, which is modulated and invisible to the human eye. The light is reflected off the target and captured by the PMD sensor, which then composes the image.
A key feature of the system is the use of dynamic tilt sensors, which control the self-leveling cylinders to keep the machine body horizontal so that it can accurately follow the growth of the vegetation on the rows, regardless of whether they are laid out in a contour line (according to the maximum slope of the terrain), on a level surface (according to the contour lines), or in an intermediate condition. Specifically, these sensors include a gyroscope and a triaxial accelerometer to form a 6-axis IMU (Inertial Measurement Unit), complete with appropriate filters to eliminate possible interference caused by vibrations and/or impacts with foreign objects.
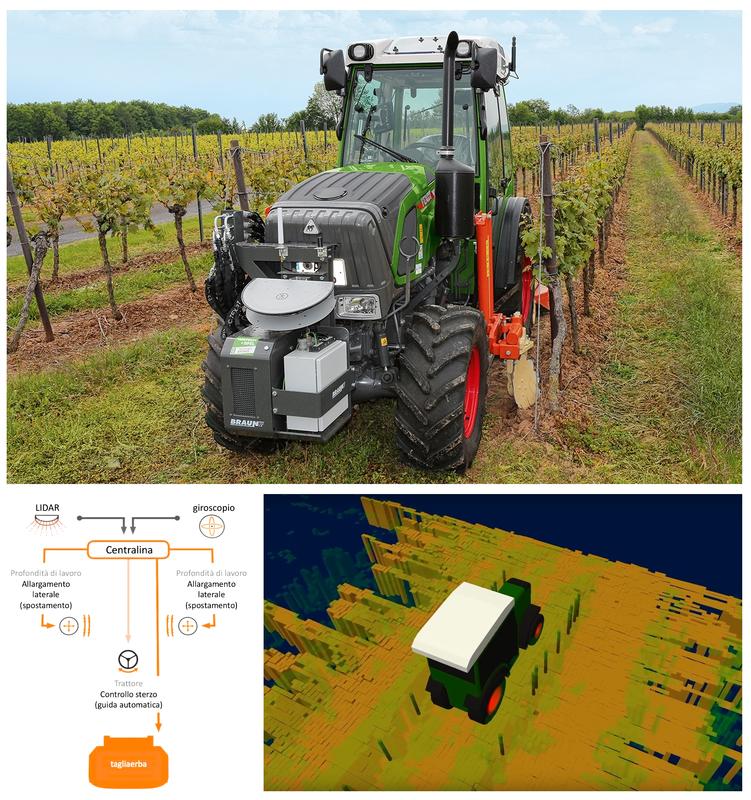
Fendt VPA (Vineyard Pilot Assistant). With the collaboration of Braun Maschinenbau GmbH, Fendt presented the VPA (Vineyard Pilot Assistant) back in 2019, an interesting solution that is able to control the tractor/implement combination with a simultaneous automatic tractor guide. The system was initially designed for mechanical weed control between rows, a vineyard operation that is known to be particularly challenging, but it can be extended to other operations. An intermediate frame developed by Braun is installed on the tractor, which allows the mounted implements to be lifted vertically on both sides. In addition, a shredding unit operates at the rear to perform combined operations in a single pass at speeds of up to 8 km/h. The data needed to control the tools is acquired via a LIDAR and a gyroscope, then processed by a control unit and displayed on a terminal.
Specifically, LIDAR detects the characteristics of the surrounding environment, i.e., vegetation, terrain profile, and poles, while the gyroscope monitors the tractor's spatial position. Together, the processed signals are used to guide the tractor along the desired path, while the coupled implements are controlled independently. Basically, the system kicks in at the start of the row, and the tools automatically move into the best working position. When they reach the end of the row, they automatically go back to their resting position.
COBO Vision Lane Navigation (VLN). Based on artificial intelligence techniques, it is a system that applies a technology called “Digital twin”: the tractor, implement, and vineyards are initially digitized to allow testing on the simulator. When a satisfactory level of performance is achieved, the system is physically installed on the machines for final calibration through successive approximations. That's why there is no need for RTK GPS, LIDAR sensors, radar, or ultrasonic sensors to make sure it can navigate between rows with precision. Furthermore, the entire system is active, i.e., it uses an electric actuator on the steering wheel to conveniently guide the tractor-equipment combination in the center of the row or close to the walls of the two adjacent rows, depending on the work to be carried out and the size of the equipment, whether it is pruning or defoliating the row, or shredding grass and vine shoots between the rows. A key element of COBO's VLN system is a special video camera that provides real-time artificial vision, which can then steer the steering wheel based on the data received. This solution is advantageous because the entire system can not only be retrofitted to any tractor but can also be transferred from one vehicle to another, even if it is not a tractor, such as a grape harvester or any other self-propelled machine.
Vinescout di Clemens. Also dedicated specifically to vineyards, French company Clemens has developed "Vinescout," a hydraulic steering control system for tractors that enables automatic driving between rows. Similar to the COBO solution, it uses a 3D stereo camera that captures images of the row walls in real-time and analyzes them, intervening on the steering to direct the tractor-equipment combination conveniently. An acoustic signal warns the driver well in advance of the end of the row, allowing them to resume manual control in order to move on to the next row. This equipment, which is also capable of operating in poor visibility conditions, is versatile in that it can be used on other machines operating in the vineyard, such as grape harvesters, in addition to tractors.
Sensor fusion. The application of sensor fusion is now standard practice for robotic tractors and even more so for actual agricultural robots. Its purpose is to acquire, process, and adapt information from various sensors, such as GPS, LiDAR, infrared, ultrasound, gyroscopes, and accelerometers installed on a vehicle for more precise and accurate analysis of the parameters to be analyzed during so-called “navigation.” Individual sensors perform specific measurements effectively but with some insurmountable functional limitations: a radar, for example, detects speed and distance but cannot mark fixed obstacles or recognize colors. Cameras, on the other hand, do the exact opposite. Thanks to the close interconnection of the data obtained, sensor fusion proves to be effective based on the concepts of redundancy, recalibration, and synchronization. However, this is not without risks because when receiving information from multiple sensors, incorrect detection by one of them can result in a delayed or ill-considered response from the entire system; in such cases, redundancy prevents collapse. Furthermore, sensor calibration and synchronization must be continuous and automatic, repeated regularly to avoid possible detection errors. A function should also be included to invalidate any incorrect input, excluding them from the decision-making process to avoid system misalignment. However, interconnection poses another risk to consider, which concerns cybersecurity: a system with multiple independent sources is less prone to critical issues than sensor fusion. In fact, a potential attacker can target the processor at the heart of the overall data processing system and disable the entire asset.
The tag RFID in the vineyard
They are among us in everyday use, but we hardly notice them. These are RFID tags, where “tag” is an English term meaning “to label,” hence the Italian neologism “taggare.” This term is widely used on social media, where a label is associated with content that has been published or is being shared.
RFID, on the other hand, is the acronym for Radio Frequency Identification, a digital automatic identification technology that allows the unique detection of objects, but also people and animals, both static and in motion, by exploiting the properties of electromagnetic fields. RFID comprises a set of hardware and software solutions designed to collect information and exchange it remotely, automatically and instantly. It is also very often used to ensure the traceability of a product throughout its supply chain, from the sourcing of raw materials to retail sales. All of these steps are known as the “supply chain.” Basically, the RFID system hardware collects data about where the product is at a certain time and throughout its whole life cycle, letting the software recognize it and giving managers a full picture of how the production, distribution, and sales processes are going. Communication takes place via radio, using different frequencies. Without going into detail, these range from low-frequency RFIDs, i.e., between 125 and 134.2 kHz, for a very limited reading distance—from a few centimeters to a maximum of one meter—to very high-frequency RFIDs (range: 2.45–5.8 GHz), whose range extends up to 100 m. There are several types of RFID tags: passive, semi-passive, and active. In the first case, there is no need for a power source (i.e., a battery). When an RFID reader approaches the tag, the tag's antennas convert the energy of the received electromagnetic waves into electrical energy, which activates the RFID tag chip to send data. The advantages include their small size and weight, long life (over 10 years), lack of maintenance, and therefore low cost. The main disadvantage is the lack of an independent power supply, which limits the reading distance and therefore requires high-power readers. On the other hand, there are active RFID tags. They have a built-in battery, which means their signals can be detected from several dozen meters away. However, they are bulkier than passive tags and more expensive, and their service life is not theoretically infinite but limited by the battery life. Semi-passive RFID tags combine the advantages of the two previous types in that the device remains in standby mode (therefore consuming very little power) until it enters the reader's detection range. They also have a faster response time than passive RFID tags and are more efficient. Conversely, compared to active tags, semi-active tags consume less energy. The main disadvantage is their high cost. Among the many applications is the monitoring of the position of objects, such as the posts in a vineyard. Therefore, by applying an RFID tag containing the relevant georeferencing to each pole (which is static), it is possible to create an efficient network for locating another element, such as a tractor (which moves and is therefore dynamic) equipped with an RFID reader. This completely eliminates the need for RTK GPS, which, being a system based on satellite radio communication, could be subject to blackouts that could completely negate its operational benefits.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}